Setelah bisa menginput Matriks, menjumlah, dan mengalikan Matriks, berikutnya kita masuk ke teori-teori yang ada dalam Matriks lebih dalam lagi. Salah satunya adalah Determinan dan Invers. Determinan penting karena merupakan komponen dari inversi suatu matriks. Invers sangat dibutuhkan dalam penyelesaina persamaan simultan yang sering dijumpai dalam teknik. Diketahui suatu matriks:

Sedangkan invers didapat dari rumus:

Bagian ad-bc pada persamaan di atas dikenal dengan nama determinan. Buka Borland/Turbo C++ untuk membuat script perhitungan determinan suatu matriks. Masukan listing berikut (ketik ulang tanda ” karena tidak dikenali jika di copas). Matriks yg akan dicari determinannya adalah a,b,c dan d berturut-turut 1,2,3, dan 4.
-
#include <iostream.h>
-
#include <conio.h>
-
void main(){
-
int i,j,det,A[2][2]={1,2,3,4};
-
cout<<“Matriks A =”<<“\n”;
-
for(i=0;i<2;i++){
-
for(j=0;j<2;j++){
-
cout<<A[i][j]<<” “;
-
}
-
-
cout<<“\n”;
-
-
}
-
det=A[0][0]*A[1][1]-A[0][1]*A[1][0];
-
cout<<“Determinan = “<<det;
-
}
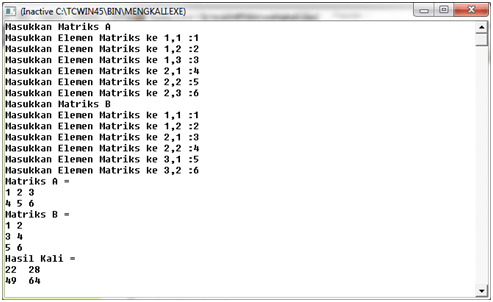
Hasilnya adalah sebagai berikut: