Tahun 2014 saya masih menjadi mahasiswa doktoral Information Management. Ada satu mata kuliah: Decision Support Technologies yang berisi bagaimana sistem informasi membantu pengambil keputusan, salah satunya dengan pemanfaatan Big Data.

Waktu itu saya satu grup dengan mhs dari Thailand dan Uzbekistan. Tugasnya cukup menarik, yaitu menggunakan data dari Kagel yang berisi jutaan record penulis artikel ilmiah yang masih kasar (raw). Targetnya adalah mengumpulkan penulis yang berserakan menjadi rapih, dimana tidak ada redundansi penulis. Terkadang ada nama penulis yang terbalik susunannya, tanpa nama tengah, dan lain-lain. Selain itu perlu deteksi untuk afiliasi dan bidang ilmunya. Yang tersulit adalah terkadang nama belakang perempuan yang mengikuti nama suami.
Kendala utamanya adalah data yang berukuran besar baik dari sisi kapasitas maupun jumlah record. Ketika dibuka dengan Excel, tidak seluruhnya terambil karena ada batas record Microsoft Excel yakni sebanyak 1,048,576 record dan 16,384 kolom. Terpaksa menggunakan sistem basis data, yang termudah adalah Microsoft Access. Waktu itu fasilitas Big Data pada Matlab masih minim, terpaksa ketika menjalankan pemrosesan paralel, secara bersamaan dibuka 3 Matlab sekaligus (lihat postingan saya tahun 2014 yang lalu).
Tipe Data Tall
Sekitar tahun 2016-an Matlab memperkenalkan tipe data Tall dalam menangani data berukuran besar. Prinsipnya adalah proses upload ke memory yang tidak langsung. Sebab kalau ketika impor data dengan cara langsung maka akibatnya memory akan habis, biasanya muncul pesan ‘out of memory‘. Oleh karena itu Matlab membolehkan mengupload dengan cara ‘mencicil’. Tentu saja untuk memperoleh hasil proses yang lengkap dengan bantuan fungsi gather.
Seperti biasa, cara mudah mempelajari Matlab adalah lewat fasilitas help-nya yang lengkap, maklum software ‘berbayar’. Lisensinya saat ini sekitar 34 jutaan, kalau hanya setahun sekitar 13 juta dan kurang dari 1 juta untuk pelajar. Pertama-tama ketik saja di Command Window: help tall. Pastikan muncul, jika tidak muncul, berarti Matlab Anda belum support fungsi Big Data tersebut. Walau mahal, tetapi Anda bisa mencoba sebulan secara gratis. Ok, jalankan saja help yang muncul.

Dengan fungsi datastore, pertama-tama sampel Big Data disiapkan. Di sini masih menggunakan Comma Separated Value (CSV). Perhatikan hasil proses fungsi tall yang berupa matriks berukuran Mx4. Nah, disini istilah M muncul yang berarti ‘beberapa’, karena yang ditarik belum seluruhnya.
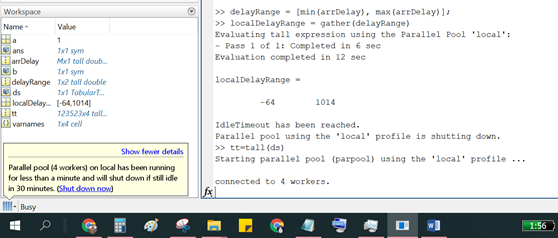
Tampak paralel pool sudah terbentuk, dengan 4 worker. Di sini dibatasi 30 menit, jika idle/tidak digunakan akan di-shutdown. Terakhir, fungsi gather dibutuhkan untuk merekapitulasi hasil olah.

Tampak informasi pooling yang merupakan ciri khas pemrosesan paralel telah selesai dilakukan. Sekian, semoga informasi ini bermanfaat.