[m.kul,ruang,dosen,jur:t-pemodelan-simulasi,software,rahmadya-phd,t-kom-d3]
Berbicara mengenai fungsi alih, mau tidak mau harus sedikit kilas balik ke materi pengenalan pengaturan (tek. Kendali). Untuk mudahnya ambil kasus sederhana suspensi kendaraan (post terdahulu). Fungsi alih suatu sistem suspensi adalah:
Fungsi Alih = 1/(ms^2+cs+k)
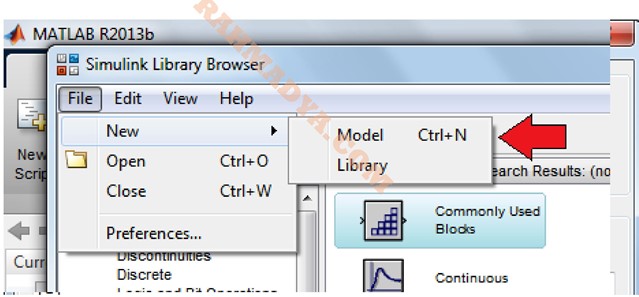
m, c dan k berturut-turut massa (Kg), peredam (N.s/m), dan konstanta pegas (N/m). Kemudian untuk memasukan variabel dinamis fungsi alih, buka simulink dengan mengetik simulink pada command window Matlab.
Memasukan Variabel Dinamis
Untuk mensimulasikan sistem suspensi pada model simulink masukan tiga diagram blok antara lain: masukan tangga, fungsi alih, dan keluaran yang ditangkap oleh scope. Masukan tangga berada di bagian SOURCE, fungsi alih di bagian CONTINUOUS, dan scope pada bagian SINK. Caranya adalah dengan mendrag ke lembar model.
Atur fungsi alih (transfer function) agar diperoleh persamaan di awal tulisan ini. Gunakan variabel m, c dan k yang mewakili massa, peredaman, dan kekakuan pegas.

Tekan ganda transfer function dan isikan sebagai berikut. NOTE: Nilai m, c dan k di sini berupa variabel yang jika langsung dijalankan akan memunculkan pesan kesalahan.

Mengisi Variabel lewat Command Window
Bagaimana memasukan m, c, dan k? Mudah saja, kembali ke command window, ketikan saja tiga variabel itu dengan bilangan.
>> m=100;
>> c=20;
>> k=5;
Kembali ke jendela model. Tekan tombol RUN pada jendela model yang berupa segitiga warna hijau. Pastikan tidak muncul error. Lanjutkan dengan mengklik ganda SCOPE untuk melihat grafiknya.

Atur komposisi c dan k agar diperoleh respon yang halus (smooth). Bagaimana terapan ke program GUI-nya? Sepertinya butuh postingan tersendiri karena ada sedikit masalah saat praktek tadi, yaitu data m, c, dan k tidak terkirim ke jendela model.
