Simulasi mencoba menjalankan suatu model seolah-olah mengikuti kenyataan yang ada. Simulasi banyak diterapkan dalam permainan. Misalnya pemain bola, C. Ronaldo, dalam game memiliki akurasi tinggi dalam mencetak gol, tetapi tentu saja tidak selalu tendangannya akurat, seperti kenyataan di lapangan sesungguhnya. Jadi ketika pemain tersebut mengeksekusi, program harus membangkitkan suatu bilangan acak dalam rentang akurasinya sehingga bisa saja tendangannya (misal pinalti) tidak berhasil.
Fungsi “rand” di Matlab
Salah satu fungsi di Matlab yang membangkitkan bilangan random adalah fungsi rand. Fungsi ini membangkitkan bilangan acak dari nol hingga satu dalam pecahan. Ketik saja “rand” pada command window maka akan dimunculkan bilangan pecahan yang dimaksud.
Silahkan ketik help rand di command window maka akan muncul tata cara penggunaannya. Bahkan ada varian lagi dari fungsi tersebut di bagian akhir help (suggestion). Untuk membuat bilangan random yang dalam rentang tertentu, misal 9 hingga 10 butuh trik kusus, misalnya rand*10 atau 9+rand.
Contoh Kasus
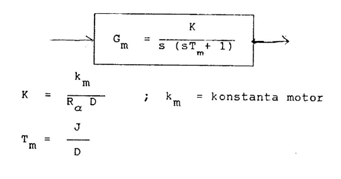
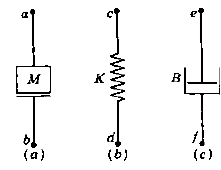
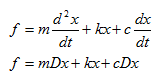
Program berikut mensimulasian fungsi tangga dari suatu rangkaian masa dan suspensi. Disimulasikan beberapa komposisi pegas dan peredam yang menghasilkan beberapa kemungkinan. Perlu pengetahuan fungsi alih (transfer function) dan juga penggunaan fungsi plot pada Matlab. Buku command window.
-
figure
-
hold
Dua instruksi di atas akan menyiapkan satu gambar yang akan digunakan untuk menangkap output tiap-tiap komposisi pegas peredam. Fungsi hold membuat grafik menangkap lebih dari satu komposisi.
-
m=100;
-
for i=1:4
-
c=rand*10;
-
k=rand*10;
-
model=tf([1],[m c k])
-
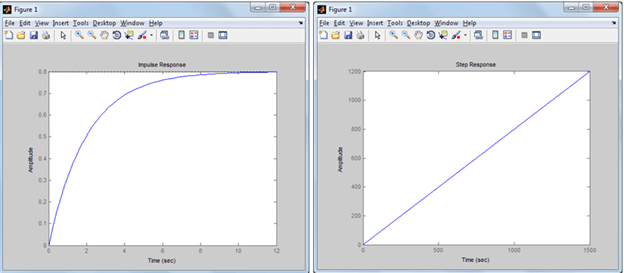
step(model)
-
end
Kemudian Matlab mengeksekusi kode di atas dengan jumlah loop sebanyak empat kali. Tiap loop mencetak (fungsi step) model yang dalam bentuk fungsi alih tersebut. Massa diset 100 karena memang tidak terlalu berubah (massa motor, mobil, dan sebagainya cenderung tetap). Di sini nilai hanya sebagai contoh saja (tanpa satuan, dan standar yang telah ditentukan dalam perancangan elemen mesin). Selamat mencoba.

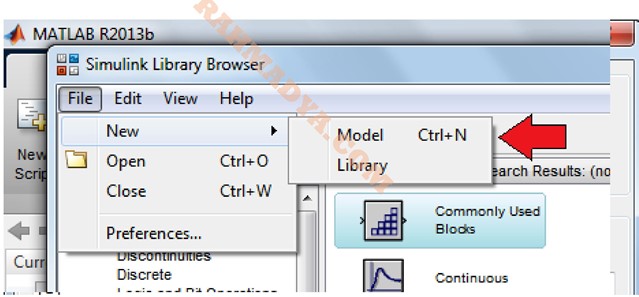















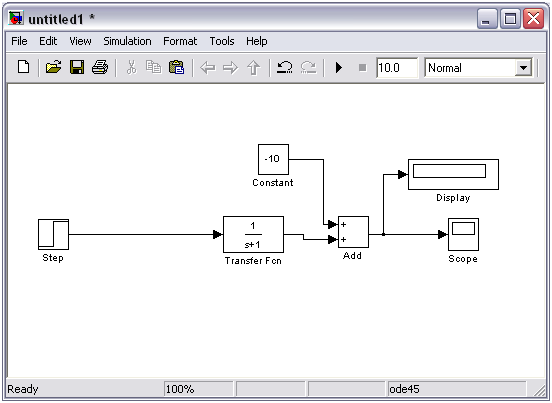
 di Matlab. Tunggu beberapa saat hingga matlab memunculkan jendela simulink. Untuk menggambar diagram blok baru klik icon
di Matlab. Tunggu beberapa saat hingga matlab memunculkan jendela simulink. Untuk menggambar diagram blok baru klik icon  (new) pada jendela Simulink Library browser. Gambar bentuk contoh di bawah ini.
(new) pada jendela Simulink Library browser. Gambar bentuk contoh di bawah ini.
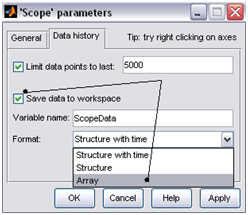
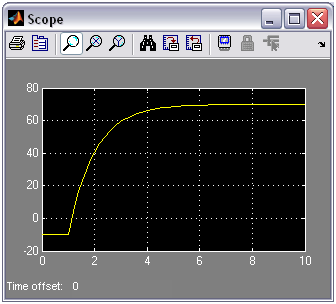
 (run) dan ganti angka di sebelah kanannya sesuai keinginan. Defaulnya adalah 10 detik, Anda bisa mengganti menjadi 100 detik atau lebih sesuai dengan kebutuhan. Hasilnya tampak pada gambar di bawah ini.
(run) dan ganti angka di sebelah kanannya sesuai keinginan. Defaulnya adalah 10 detik, Anda bisa mengganti menjadi 100 detik atau lebih sesuai dengan kebutuhan. Hasilnya tampak pada gambar di bawah ini.
 (1)
(1)
 (2)
(2)

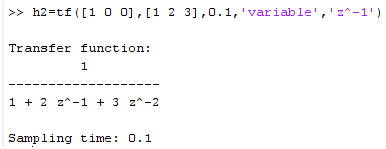















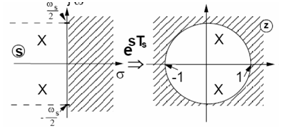
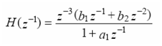



 . Buat diagram di bawah ini, caranya seperti pada kuliah pengenalan pengaturan yang lalu, hanya saja di sini kita tidak menggunakan Continuous melainkan descrete. Pilih Descrete Transfer Function.
. Buat diagram di bawah ini, caranya seperti pada kuliah pengenalan pengaturan yang lalu, hanya saja di sini kita tidak menggunakan Continuous melainkan descrete. Pilih Descrete Transfer Function.

 .
.

