Perkenalan saya dengan Matlab pertama kali adalah lewat bidang sistem kontrol/kendali. Waktu itu saya diminta dosen pembimbing untuk mensimulasikan sistem suspensi ketika ada beberapa respon masukan (impulse, step, dan sinusoidal) mengenainya. Kembali saya membuka buku catatan mata kuliah getaran dan teknik pengaturan. Untuk mensimulasikan sesuatu kita harus mampu membuat model matematis dari sistem yang akan kita simulasikan. Model matematis itu kemudian disimulasikan di Matlab untuk melihat respon dan kinerja dari model tersebut. Asalkan sudah dalam bentuk model matematis, Matlab mampu mensimulasikan tanpa memandang domain ilmu dari model tersebut, apakah kimia, elektro, ekonomi, biologi, dan lain-lain. Misalnya kasus motor listrik (atau bisa juga generator).

Gambar di atas adalah motor DC yang saya ambil dari situs kampus UPI ini semoga masih ada. Fungsi alih sendiri (dalam istilah Inggris transfer function) dari arti katanya fungsi yang mengalihkan dari satu masukan ke keluaran tertentu. Jika masukannya tegangan dan keluarannya tegangan yang lebih besar, bisasanya disebut penguat, tetapi ada juga masukannya putaran, misal potensiometer, keluarannya arus/tegangan dan sering diistilahkan dengan transducer. Ada juga istilah lainnya yakni sensor, yang merubah masukan tertentu seperti suhu, level ketinggian air, dan lain-lain menjadi tegangan atau arus yang masuk ke dalam perangkat elektronika.
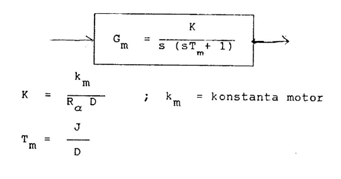
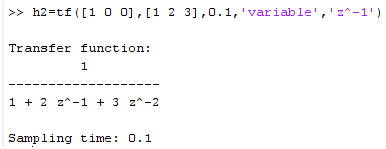
Untuk kasus motor DC di atas jika dilihat, masukannya adalah tegangan dari baterai arus searah dan keluaranya adalah puntiran di motor em. Variabel s adalah variabel Laplace. Apa itu? Yah .. mau nggak mau belajar dulu dasar-dasar sistem kontrol. Karena nanti setelah ada variabel laplace ada lagi variabel z kalau sudah masuk ke sistem digital yang melibatkan metode cuplik/sampling. Untuk orang elektro tidak ada masalah dengan besaran-besaran di atas beserta satuannya yang pasti. Situs dari malang ini lebih lengkap dengan besaran dan satuan juga teknik simulasinya.

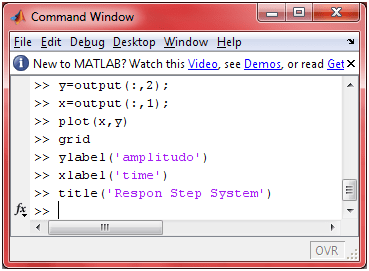
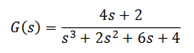
Jika J= 10, D=5, km=2, dan Rα=0.5 maka diperoleh fungsi alih sebesar, pembilang=2/(0.5*5)=0.8 dan penyebut=s(s*(10/5)+1)=s(2s+1). Buka Matlab dan masuk ke command window. Masukan instruksi ini:

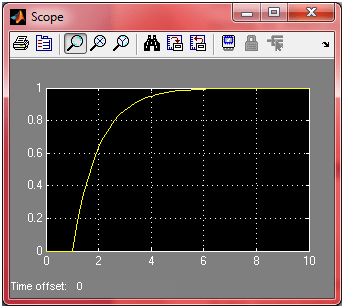
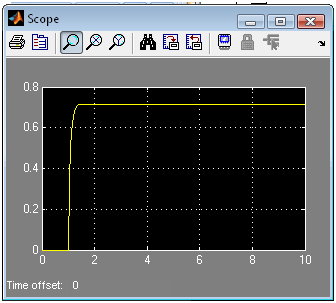
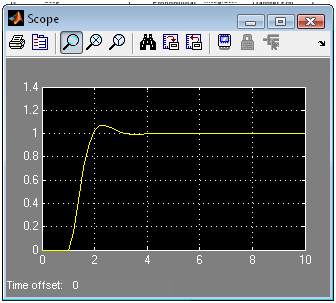
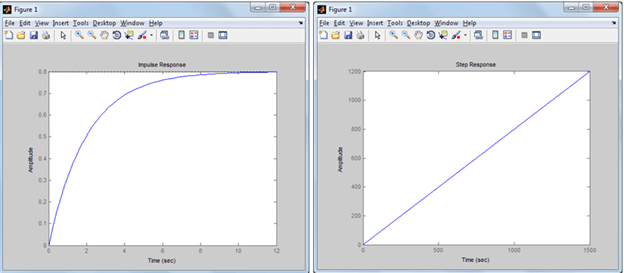
Lalu muncul plot setelah instruksi masukan impulse diterima fungsi alih, demikian pula setelah masukan tangga (step) diberikan.
Ntah bener atau salah, mohon koreksinya. Tapi setahu saya, motor DC itu harus diberi beban karena tanpa beban dia akan bertambah kencang bahkan bisa merusak motor itu sendiri.


















 (1)
(1)
 (2)
(2)
















 . Buat diagram di bawah ini, caranya seperti pada kuliah pengenalan pengaturan yang lalu, hanya saja di sini kita tidak menggunakan Continuous melainkan descrete. Pilih Descrete Transfer Function.
. Buat diagram di bawah ini, caranya seperti pada kuliah pengenalan pengaturan yang lalu, hanya saja di sini kita tidak menggunakan Continuous melainkan descrete. Pilih Descrete Transfer Function.

 .
.





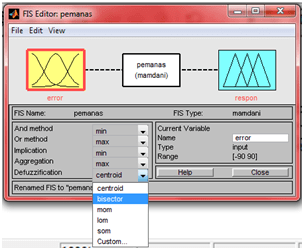
 (simulink), gambar bentuk di bawah ini, jika tidak bisa menemukan Fuzzy Logic Controller (FLC) ketik “fuzzy” di searching. Dobel klik pada “Fuzzy” di simulink, isi parameter dengan ‘pemanas.fis’ (gunakan petik satu).
(simulink), gambar bentuk di bawah ini, jika tidak bisa menemukan Fuzzy Logic Controller (FLC) ketik “fuzzy” di searching. Dobel klik pada “Fuzzy” di simulink, isi parameter dengan ‘pemanas.fis’ (gunakan petik satu).