Peng. Pengaturan II. 17.12.2012. Teknik Komputer
Ketika kita berbicara sistem kendali digital, beberapa pakar digital yang biasanya berkecimpung dalam bidang Digital Signal Processing (DSP) cenderung menulis fungsi transfer:
 (1)
(1)
Dengan persamaan:
 (2)
(2)
Perhatikan pula, notasi g yang sering digunakan pada sistem kendali kontinue diganti dengan h. Buka Matlab dan buat persamaan (1) dengan kode:

Perhatikan, matlab akan otomatis merubah ke variabel diskrit z karena adanya time sampling sebesar 0.1 di akhir kode. Untuk membentuk menjadi persamaan standar (2), gunakan kode berikut:
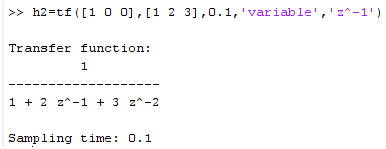
Dengan menambahkan ‘variable’,’z^-1′ di akhir kode. Namun ada sedikit permasalahan untuk kasus fungsi alih sederhana, misalnya h=1/(z+1) karena jika digunakan kode berikut untuk mendapatkan fungsi dengan variabel standar z^-1 diperoleh:

Padahal, prinsip dasarnya adalah mengalikan pembilang dan penyebut dengan pangkat z terbesar yaitu z. Seharusnya pembilangnya berharga 1/z atau z^-1, bukan 1. Oleh karena itu kita harus memodifikasi sedikit persamaan di atas menjadi:

Dengan menambah 0 dibagian pembilangnya agar diperolah hasil yang tepat. Penambahan 0 ini juga tidak berpengaruh terhadap fungsi asalnya. Di sini versi yang digunakan adalah Matlab 2008, mungkin berbeda untuk Matlab 2012.
