Karena merubah Plant sangat tidak layak, maka perancang Sistem Kendali biasanya menambahkan suatu kontroler untuk memperbaiki kinerja system. Kontroler ada tiga bagian, yaitu: Proporsional, Integrator dan Diferensiator. Buka Matlab, masuk ke simulink, klik New.

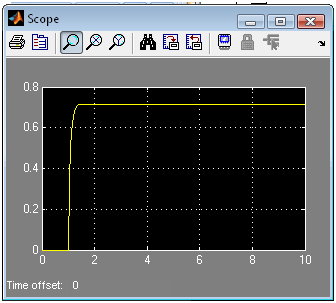
Rancanga sistem kendali lingkar tertutup, dengan G(s)=1/(s+4). Jika tanpa kontroler menghasilkan output sebagai berikut. Klik Simulation > Start. Dobel klik pada Scope, dan klik pada gambar 

Tampak bahwa ada error sebesar 0,8. Perhatikan display. Oleh karena itu kita diminta menambah kontroler guna mengurangi kesalahan tunak itu. Sedangkan kecepatan (Respon Time) dua detik. Coba tambahkan kontroler proporsional. Coba tambahkan proporsional Gain 10 x.

Tampak ada perbaikan kesalahan tunak dari 0,8 menjadi 0,29. Sedangkan kecepatan membaik (dari 2 detik menjadi 1,2 detik.
Berikutnya kita coba Integrator, misalnya tambahkan integrator 1/s sebagai kontroler. Tampak adanya perbaikan yang sempurna dari kesalahan tunak (mendekati nol).

Hanya saja ada masalah pada kecepatan system. Perhatikan gambar outputnya, walaupun kesalahan membaik tetapi kecepatannya turun drastis, dari 2 detik menjadi hamper 10 detik. Untuk system tertentu sangat tidak menguntungkan (biasanya system servo membutuhkan kecepatan system).

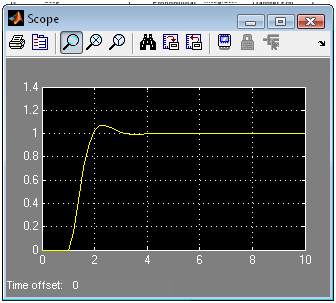
Tetapi jika digabung, proporsional + integrator, maka ada perbaikan dari kecepatan dari 10 detik menjadi hampir 3 detik dan kesalahan membaik (mendekati nol).

Hanya saja muncul gejala baru yang dikenal dengan istilah “Overshoot”, sebesar 10%.
Terkadang Overshoot bisa berbahaya jika terlampau tinggi. Misal listrik, jika terlalu sering overshoot, akan merusak komponen. Berikutnya gabungan antara Proporsional (P), Integrator (I) dengan Diferensiator (D), atau dikenal dengan istilah PID.

Pada prinsipnya diferensiator bermanfaat untuk mempercepat system, tetapi dampaknya ada riak (derau) pada system. Mungkin sangat mengganggu untuk system tertentu. Pada Matlab, PID dapat kita rancang dengan toolbox PID. Pada simulink, search “PID” makan akan diperoleh toolbox tersebut.
Letakan pada posisi kontroler, atur ukuran P, I dan D sesuai dengan kebutuhan system yang optimal. Selamat mencoba.


bang pengontrolan dengan PID, apakah dapat membuat kecepatan putaran menjadi stabil jika diberi beban,
harusnya kembali ke posisi yg dituju. jika tidak, berarti komposisi PID-nya harus diperbaiki. Kenapa gak fuzzy (flc) aja?