Metode Elemen Hingga. 17.12.2012. Teknik Mesin S1
Minggu lalu materi batang thurst telah berakhir dan sekarang kita masuk ke materi beam. Beam berbeda dengan thrust dalam hal gaya yang bekerja. Pada beam, gaya yang bekerja biasanya momen dan bending seperti pada jembatan, jalan, lantai, dan sejenisnya. Beberapa teori mengenai hal ini banyak dijumpai seperti metode defleksi, thimosenko, dan sebagainya.
Berikut ini diberikan contoh kasus, Diketahui A = 2 in, E = 3000000 psi, dan L = 10 cm.
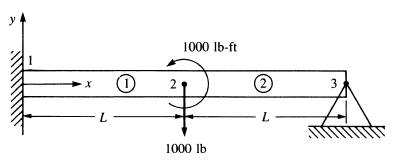
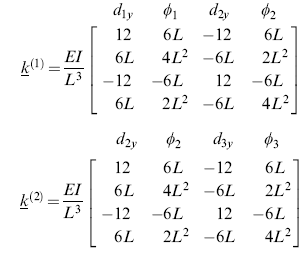
Batang mengalami puntiran dan gaya tekan ke bawah antara elemen (1) dan elemen (2). Ujung kiri dan kanan tidak boleh bergerak (dijepit) dalam arah vertikal. Kita gunakan persamaan yang telah dijabarkan oleh Logan (2007):
 (1)
(1)
Untuk elemen (1) dan elemen (2). Karena koordinat sudah tepat pada x dan y maka tidak perlu melakukan konversi koordinat lagi (tidak perlu tana ^ di atas koordinat). Setelah matriks kekakuan global ditentukan, hubungan gaya luar dengan pergeseran elemen (sudut dan jarak) dapat diketahui.
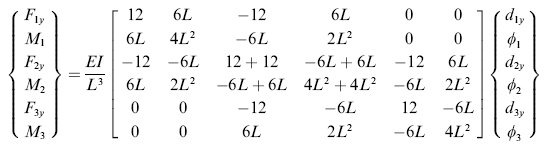 (2)
(2)
Perhatikan kasus di atas untuk mengisi kondisi batas yang ada. Pemahaman kondisi batas sangat penting dalam menyelesaikan kasus yang dihadapi, minimal mengurangi variabel-variabel yang tidak terlibat. Berikut ini adalah kondisi batas yang diidentifikasi:
 (3)
(3)
Akibatnya adalah persamaan (2) menjadi jauh lebih sederhana:
 (4)
(4)
Buka Matlab, masukan variabel-variabel yang diketahui, E, I dan L serta gaya aksi F. Cari dengan instruksi d=inv(K)*F yang akan diperoleh pergeseran sudut dan jarak di elemen 2 dan 3.
>> A=2;
>> E=3000000;
>> I=500;
>> L=0.1;
>> K=[24 0 6*L;0 8*L*L 2*L*L; 6*L 2*L*L 4*L*L];
>> K2=(E*I/(L^3))*K;
>> F=[-1000;1000;0];
>> d=inv(K)*F
d =
1.0e+004 *
0.0240
1.5312
-1.1250
 (1)
(1)
 (2)
(2)